


Photoelectric sensors are fundamental components in modern industrial automation, object detection, and safety systems. Their operation hinges on the use of light to detect the presence, absence, or distance of an object. A critical specification that defines their capability and application suitability is the sensing range. This parameter is not a single fixed value but a spectrum influenced by multiple factors, and understanding it is key to selecting the right sensor for any task.
At its core, the sensing range refers to the maximum distance at which a photoelectric sensor can reliably detect a standard target under specified conditions. This is distinct from the "operating range" or "set distance," which is the actual working distance used in an application. Sensors are typically categorized by their operating principle—diffuse, retro-reflective, and through-beam—each with inherent range characteristics.
Through-beam sensors, consisting of separate emitter and receiver units, offer the longest possible ranges, often extending up to several hundred meters. The emitter projects a light beam directly to the receiver. An object is detected when it interrupts this beam. This design provides high energy efficiency and immunity to target color, texture, or reflectivity, making long-range detection robust.
Retro-reflective sensors house both emitter and receiver in a single housing, relying on a reflector to bounce the light beam back. Their effective range is shorter than through-beam types but longer than most diffuse models, commonly reaching up to 10-15 meters. Performance can be affected by the reflector's condition and the reflectivity of interfering objects.
Diffuse (proximity) sensors, with co-located emitter and receiver, detect objects by measuring the light reflected directly from the target's surface. This makes them highly dependent on the target's properties. Their range is the shortest, typically from a few centimeters to about one meter. Light-colored, highly reflective objects can be detected at the sensor's maximum nominal range, while dark, matte, or absorbent surfaces significantly reduce the effective sensing distance.
Several key factors directly modulate the practical, achievable range of a photoelectric sensor:
1. Target Properties: The color, surface finish, material, and size of the target are paramount, especially for diffuse sensors. A white, glossy object reflects more light than a black, matte one, allowing for longer detection ranges.
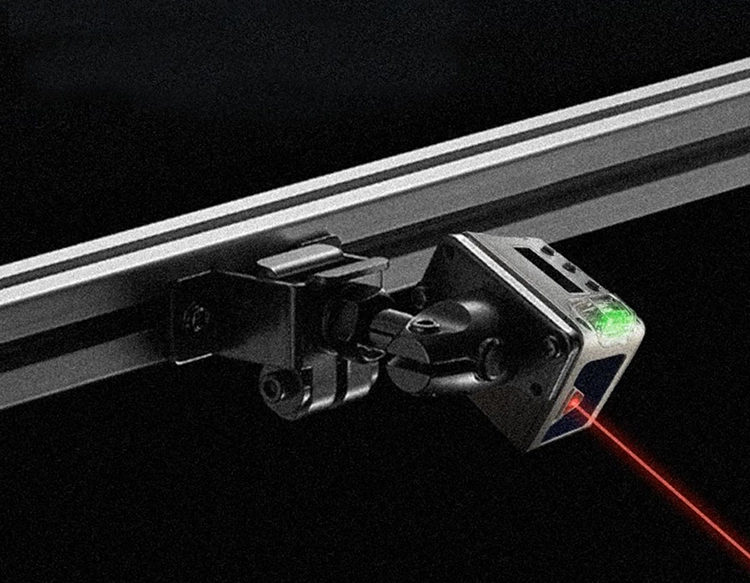
2. Light Source Type: Traditional infrared LEDs are common and cost-effective. Modern sensors increasingly use red or blue LEDs, or even laser diodes. Lasers provide a highly collimated beam, enabling very long, precise ranges and the detection of extremely small objects.
3. Lens Design and Aperture: The optical system focuses the emitted light and collects the reflected light. A larger lens aperture generally allows for greater range by gathering more light.
4. Environmental Conditions: Ambient light (especially sunlight containing infrared), dust, fog, steam, and temperature fluctuations can scatter or overpower the sensor's light signal, drastically reducing reliable range. Many sensors feature modulated light signals and specialized filters to combat this interference.
5. Electrical Design and Receiver Sensitivity: The power of the emitter and the sensitivity of the receiver's photodiode and amplifier circuit determine how weak a return signal can still be reliably registered.
Understanding the difference between a sensor's published "maximum range" and its "effective operational range" is crucial for application success. The maximum range is often defined under ideal laboratory conditions with a highly reflective, large target. In a real-world setting, engineers must apply a significant safety factor, often derating the published maximum by 30-50%, to account for less-than-ideal targets, lens contamination, and environmental drift over time.
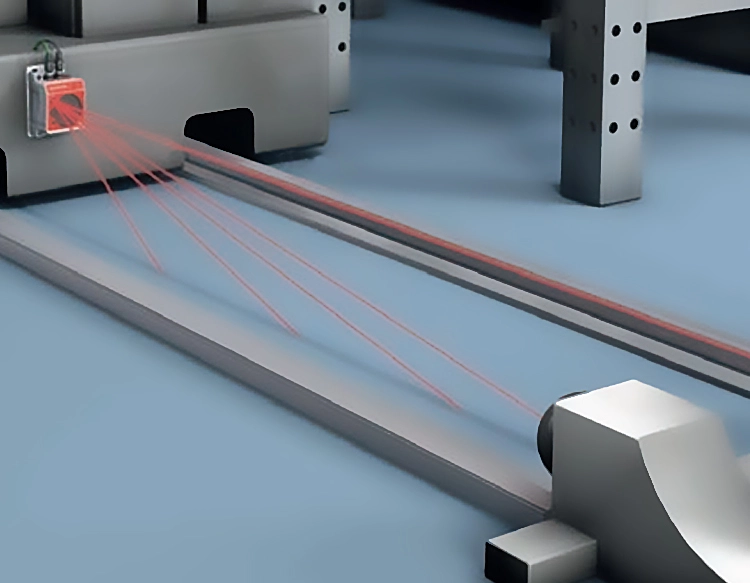
For long-range applications, such as warehouse vehicle detection or conveyor line monitoring over large gaps, through-beam or long-range polarized retro-reflective sensors are the default choices. For medium-range tasks like pallet presence detection or bottle counting on a line, standard retro-reflective or focused diffuse sensors work well. Short-range, precise positioning, or color discrimination tasks benefit from focused or background suppression diffuse sensors.
In conclusion, the range of a photoelectric sensor is a dynamic specification, not merely a number on a datasheet. Successful implementation requires a holistic analysis of the sensor type, target characteristics, and the operating environment. By carefully matching these variables, engineers can ensure reliable, long-term performance, maximizing efficiency and minimizing downtime in automated systems. Always consult manufacturer specifications and application notes, and consider real-world testing with the actual target under expected conditions to finalize sensor selection.