


In today's increasingly automated world, obstacle sensors have become a fundamental component in a vast array of systems, enabling machines to perceive and navigate their environments safely. These devices are engineered to detect the presence of objects within a specified range, triggering a response to avoid collisions or to initiate a specific action. Their operation hinges on various physical principles, leading to different sensor types suited for diverse applications.
One of the most common and cost-effective types is the infrared (IR) sensor. It typically consists of an IR transmitter, usually an LED, and an IR receiver, a photodiode. The transmitter emits an infrared light beam. When an object enters the detection zone, it reflects this beam back to the receiver. The sensor's circuitry then processes this signal to determine the object's presence and, in some advanced models, its approximate distance. IR sensors are prevalent in simple applications like automatic door openers, line-following robots, and touchless faucets. However, their performance can be affected by ambient light and the reflectivity of the target object.
For more precise distance measurement and reliable performance under varying lighting conditions, ultrasonic sensors are a popular choice. These sensors work on the principle of echolocation, similar to bats. They emit high-frequency sound waves (inaudible to humans) and then listen for the echo reflected from an object. By calculating the time interval between sending the signal and receiving the echo, the sensor can accurately determine the distance to the obstacle. This makes them ideal for applications like parking assist systems in vehicles, liquid level measurement in tanks, and robotic navigation where precise ranging is required. Their main limitation is that soft, fabric-like materials may absorb the sound waves, reducing detection reliability.
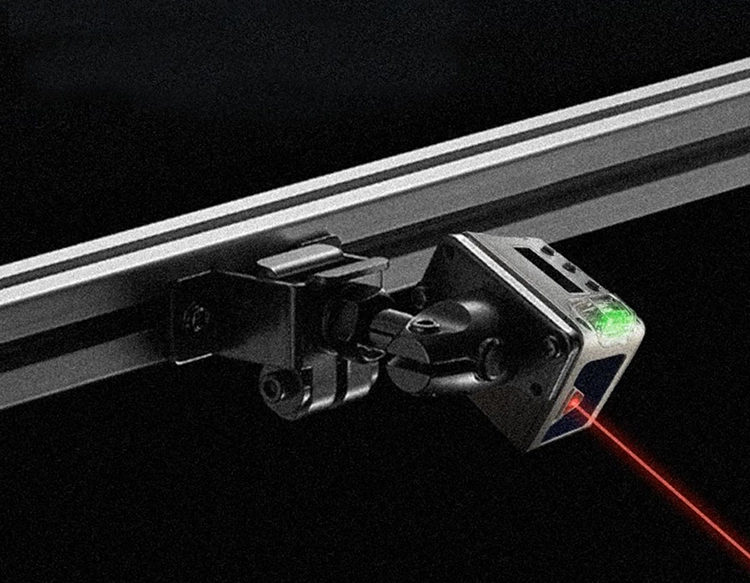
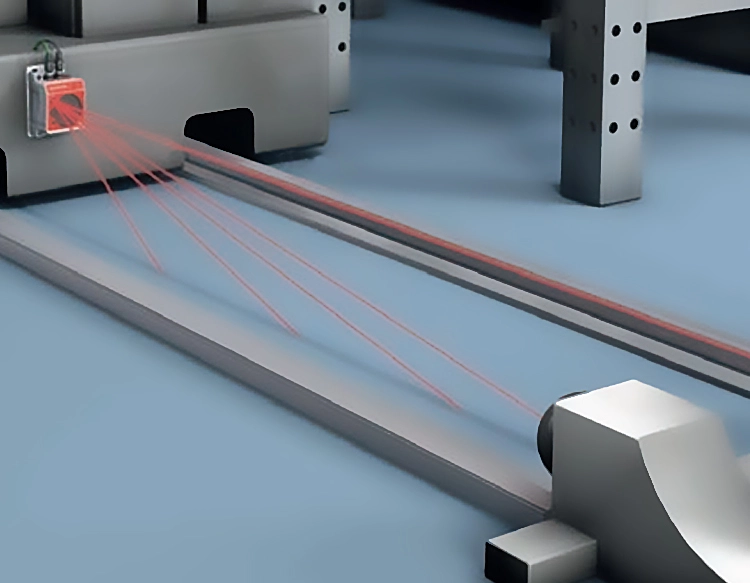
In advanced robotics and autonomous vehicles, LiDAR (Light Detection and Ranging) sensors represent a high-end solution. LiDAR systems use laser pulses to create high-resolution, three-dimensional maps of the surrounding environment. By scanning laser beams across a scene and measuring the time for the light to return, they can generate precise point-cloud data, identifying not just the presence of an obstacle but also its shape, size, and exact position. This capability is crucial for the complex decision-making needed in self-driving cars, drone navigation, and sophisticated industrial automation. While offering unparalleled accuracy, LiDAR systems are significantly more expensive than IR or ultrasonic sensors.
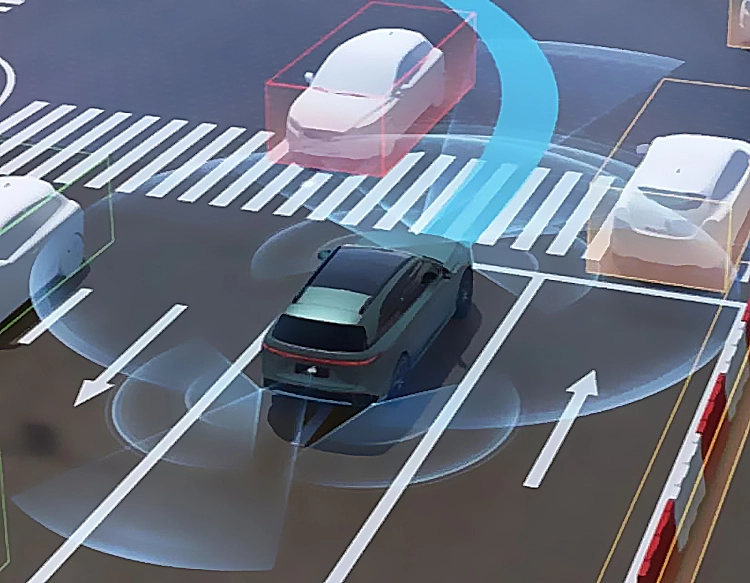
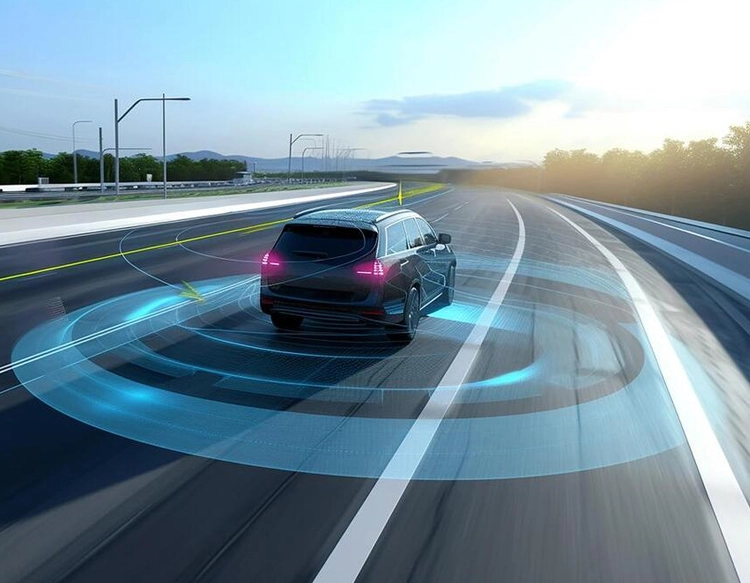
Another critical category is the vision-based sensor, which encompasses standard cameras and more specialized units like stereo cameras or time-of-flight (ToF) cameras. These sensors capture visual data from the environment, which is then processed by sophisticated algorithms for object detection, classification, and distance estimation. While offering rich contextual information (like color and texture), vision systems are computationally intensive and their performance can degrade in poor lighting conditions, such as darkness or direct glare. They are often used in conjunction with other sensors, like radar or ultrasonic, in systems requiring a high level of environmental understanding, such as advanced driver-assistance systems (ADAS).
The applications of obstacle sensors are virtually limitless. In the consumer domain, they are the eyes of robotic vacuum cleaners, allowing them to navigate around furniture and avoid falling down stairs. In industrial settings, they ensure safety by creating protective fields around dangerous machinery, instantly halting operation if a worker enters the zone. The automotive industry relies on a sensor fusion of radar, ultrasonic, and cameras to power features like adaptive cruise control, automatic emergency braking, and blind-spot monitoring. Furthermore, in the burgeoning field of service robotics, from warehouse logistics robots to delivery drones, obstacle sensors are indispensable for autonomous mobility and task completion.
Selecting the right obstacle sensor depends on several key factors: the required detection range and accuracy, environmental conditions (light, dust, weather), the nature of the objects to be detected, power consumption constraints, and of course, cost. A simple toy robot might use an IR sensor, while an autonomous mining truck would require a robust combination of LiDAR, radar, and cameras. Understanding the strengths and limitations of each technology is the first step in designing an effective and reliable sensing system. As technology progresses, we can expect these sensors to become even more miniaturized, energy-efficient, and intelligent, further blurring the lines between the digital and physical worlds and enabling a new generation of interactive and autonomous machines.