









激光雷达在来车检测方面的应用凭借其高精度、强环境适应性等优势,成为智能交通、自动驾驶及安全辅助领域的关键技术。以下从应用场景、技术原理、核心优势及实际案例等方面展开说明:
一、核心应用场景
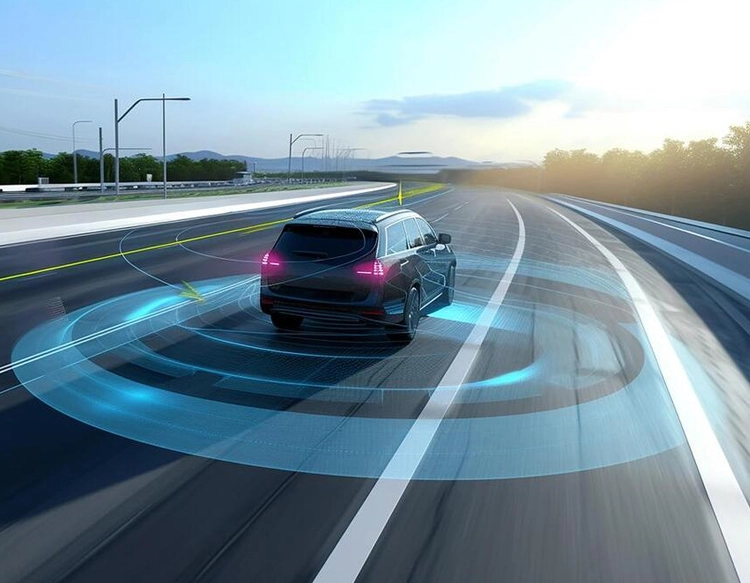
激光雷达通过发射激光束并接收反射信号,构建周围环境的三维点云模型,从而精准检测来车的位置、速度、方向等信息,主要应用于以下场景:1. 自动驾驶车辆(ADAS/自动驾驶)
作为自动驾驶的“眼睛”之一,激光雷达可实时检测前方、侧方及后方的来车,包括轿车、货车、摩托车等,辅助车辆实现车道保持、自动避让、交叉路口通行等功能。
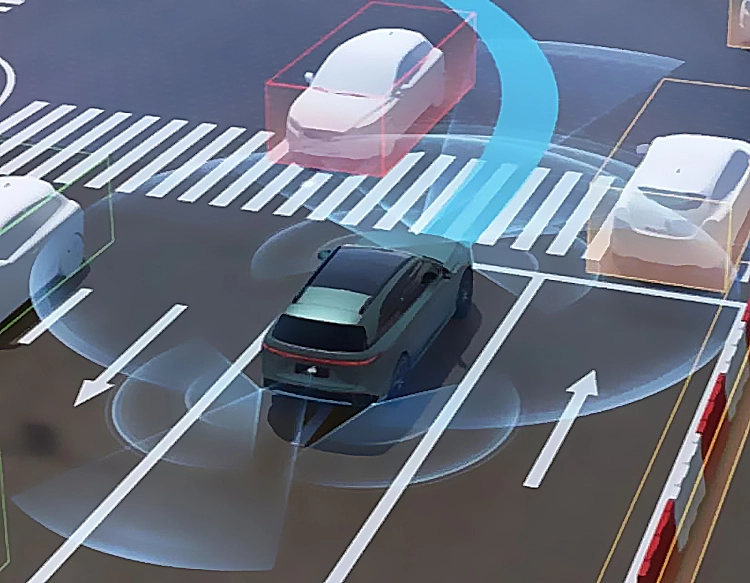
例如,在无信号灯路口,激光雷达能提前识别横向驶来的车辆,计算碰撞风险并触发减速或停车指令。
2. 智能交通系统(ITS)
安装在道路旁、交通信号灯杆或高架桥上的激光雷达,可对特定区域(如路口、匝道、隧道出入口)的来车进行全天候监测,统计车流量、识别违规变道、预警拥堵或事故风险。
例如,在高速公路匝道入口,激光雷达可检测主线来车的速度和间距,为并入车辆提供安全提示。
3. 车辆安全辅助装置
用于商用车(如卡车、公交车)的盲区监测,激光雷达可覆盖驾驶员视线死角(如车辆右侧、后方),当检测到有来车或行人靠近时,通过声光报警提醒驾驶员,避免剐蹭事故。
在停车场场景中,激光雷达可辅助车辆检测通道内的来车,实现自动避让或低速通行。
4. 铁路与轨道交通
在铁路道口或轨道交通沿线,激光雷达可检测是否有车辆(如汽车、拖拉机)闯入轨道区域,及时触发道口栏杆关闭、声光报警,甚至联动列车减速。
二、技术原理
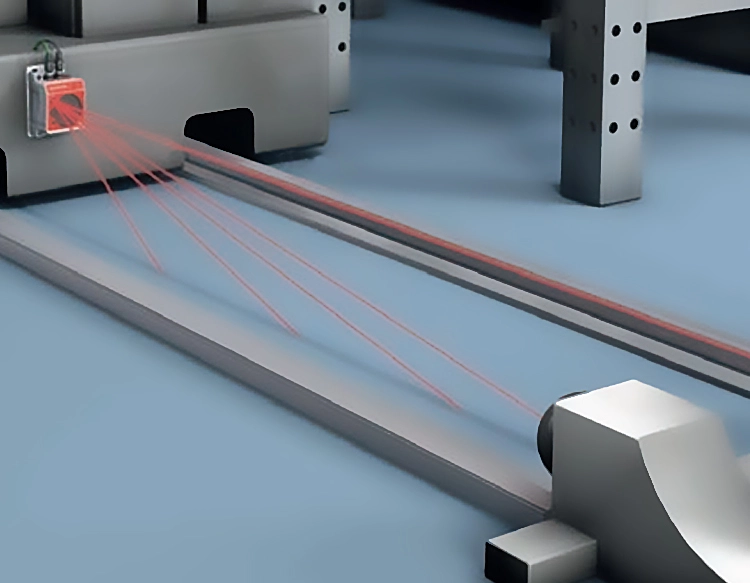
激光雷达来车检测的核心流程包括:1. 激光发射与回波接收
激光雷达通过发射器发射高频率激光脉冲(通常为近红外光),光束遇到车辆等物体后反射,被接收器捕捉。
2. 距离与方位计算
根据激光脉冲的飞行时间(TOF,Time of Flight)或相位差,计算激光雷达与来车的距离;结合雷达的旋转角度或多线阵列布局,确定来车的水平和垂直方位。
3. 点云数据处理与目标识别
大量激光脉冲反射形成三维点云,通过算法(如聚类、分割、特征提取)从点云中识别出“车辆”目标,排除行人、树木、护栏等干扰物,并提取车辆的轮廓、尺寸、运动轨迹等特征。
4. 动态追踪与风险评估
对识别到的来车进行持续追踪,计算其速度、加速度及运动方向,结合自身(或本车)的位置和运动状态,评估碰撞风险(如TTC,碰撞时间),并输出预警或控制信号。
三、相比其他传感器的核心优势
| 传感器类型 | 激光雷达优势 | 局限性 |
|---|---|---|
| 摄像头 | 不受光照影响(夜间、逆光均稳定),可直接获取三维距离信息,无需依赖视觉算法的“深度估计” | 成本较高;点云数据处理复杂度高 |
| 毫米波雷达 | 抗恶劣天气能力更强(暴雨、大雾、粉尘环境下仍可靠工作),对金属物体(车辆)的反射率高,检测稳定性好 | 分辨率较低,难以识别车辆细节 |
| 超声波雷达 | 测量精度高(近距离),可穿透部分障碍物 | 探测距离短(通常<5米),不适合高速场景 |
简言之,激光雷达在全天候环境适应性(克服光照、天气影响)和三维空间精准建模上的优势,使其成为来车检测中不可或缺的补充技术。
四、实际应用案例
1. 自动驾驶汽车
特斯拉(部分车型)、Waymo、小鹏等企业的自动驾驶系统中,激光雷达(或与其他传感器融合)用于来车检测。例如,Waymo的激光雷达可在100米外检测到来车,并预测其行驶轨迹,确保自动驾驶车辆在复杂路口安全通行。
2. 智能路口监测
中国部分城市的智慧交通试点项目中,在路口安装激光雷达(如华为、速腾聚创的产品),实时监测各个方向的来车流量和速度,动态调整信号灯时长,缓解交通拥堵。
3. 商用车盲区预警
沃尔沃卡车的“盲点信息系统”(BLIS)中,激光雷达与摄像头结合,检测车辆右侧盲区的来车,当有碰撞风险时,通过方向盘震动或声光报警提醒驾驶员。
总结
激光雷达通过三维环境感知和强抗干扰能力,在来车检测中实现了高精度、全天候的目标监测与追踪,为自动驾驶、智能交通及车辆安全辅助提供了关键技术支撑。随着成本下降和算法优化,其应用场景将进一步扩展,推动交通系统向更安全、高效的方向发展。



















网站导航
-

欧洲办事处:
linia centura nr 20 afumati jud ilfov ROMA.NIA COD POST 077010 -
东南亚办事处:
Thailand:48/14 Soi Roong Ruang, Ratchapisek Road,Samsen Nok Sub-district, Huai Khwang DistrictBangkok 10310 新加坡:18 Boon Lay Way,TradeHub 2l#07-132,Singapore 609966 -
公司地址:
江苏省南京市江宁区科建路777号











